HUD 抬头显示标定设备
HUD视觉结构
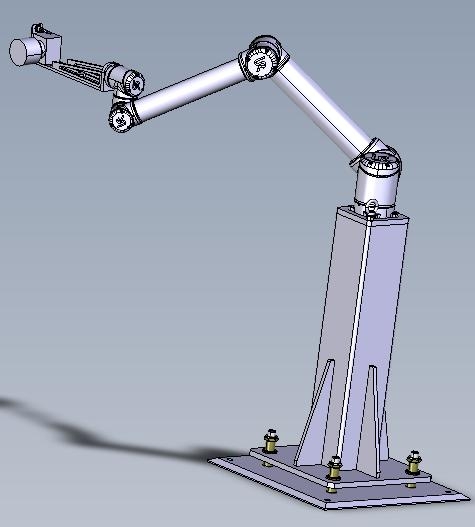
协助机器人装置3D模型示意图
采用六轴协作机器人全自动方式移动相机,无需操作人员提供辅助移动操作。机器人不工作时机器人整体自动移动至远离驾驶位位置,方便驾驶员下车。
六自由度机器人拥有≥7kg负载能力,适用于标定相机的安装和移动,其定位精度达到±0.5mm。
主要技术规格
协作机器人 | 节卡或艾力特 |
有效负载 | ≥6kg 且满足标定要求 |
有效臂展 | ≥910mm 且满足标定要求 |
关节范围 | ±175度 |
重复定位精度 | ±0.3mm |
自由度 | 6个旋转关节 |
移动定位精度 | ±1mm |
工业相机
相机系统由机器人和带镜头的工业相机组成。机器人围绕X轴和Y轴旋转。其中围绕Y轴的自动旋转功能用于控制相机的下视(俯仰)角,这使得相机系统能适应不同的车型。机器人具有围绕X轴的调整功能,用于控制相机的水平(横滚)角,使得相机系统也能补偿左右轮胎压不一致的情况。相机采用工业以太网POE相机,适应工业现场大规模的生产环境。
进口变焦相机,具备自动聚焦、自动曝光功能(满足所有车型,包含WHUD和AR-HUD标定)
![]()
主要技术参数
技术参数 | |
相机 厂家 品牌 传感器类型 接口 镜头接口 图像尺寸 像素尺寸 |
AVT Manko G CMOS GigE,POE C型 1280*1024 5.3um*5.3um |
镜头焦距 | 按需求决定 |
机器人控制精度 下视(俯仰)角 水平(横滚)角 |
±0.1° ±0.1° |
机器人旋转范围 下视(俯仰)角 水平(横滚)角 |
±45° ±45° |
背景墙
自动背景墙设立在车辆前方,当标定时背景墙自动升降到遮光位置,消除前方环境光对摄像系统的干扰。
![]()
形式 | 龙门架不透光黑色快速门或遮光黑布 |
遮光区域 X Z |
±1000 mm 0~1800 mm |
控制方式 | 变频电机驱动 |
![]()
AR-HUD标定设备方案示意图
 官方网站
官方网站
 微信公众号
微信公众号
