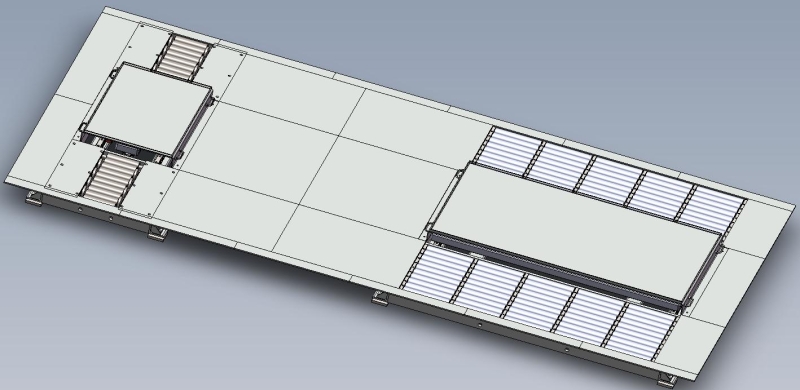
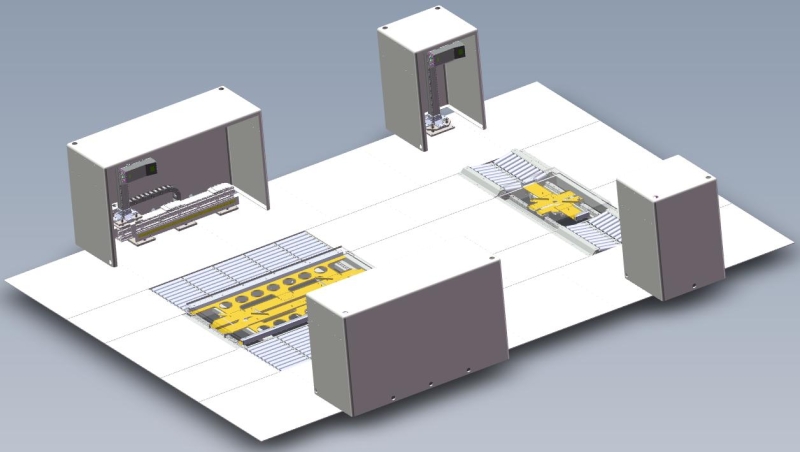
IEL系列对中装置(摆正器)用于摆正停在检验工位的测试汽车,使汽车纵向中心线与设备对正。
前轮眉高度测量传感器(2D相机) 传感器采用激光基于三角原理测量,传感器内的线性激光的位置及与相机的角度经过标定后参数被固定。635nm的红色激光垂直照射到前轴平面上轮眉最高处,经过2D相机在CCD内成像并被识别,软件对激光线解算出拐点,并根据激光三角形法原理求解拐点的Y和Z坐标,其中Z坐标也就是轮眉的高度
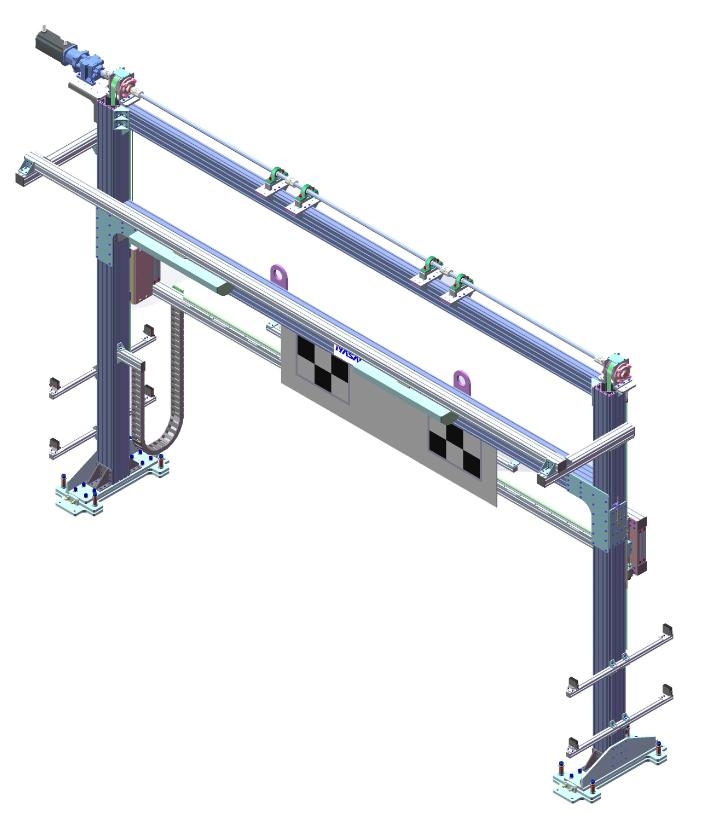
采用铝合金龙门式结构支撑ACC标定目标板,在Y轴方向上配备西门子伺服电机及圆柱滑轨,自动移动采用伺服驱动齿条传动方式,在Z轴方向上配备西门子伺服电机及直线滑轨,自动移动采用伺服驱动同步带传动方式,并且精确定位。Y向移动速度大于250mm/s、Z向移动速度大于150mm/s。
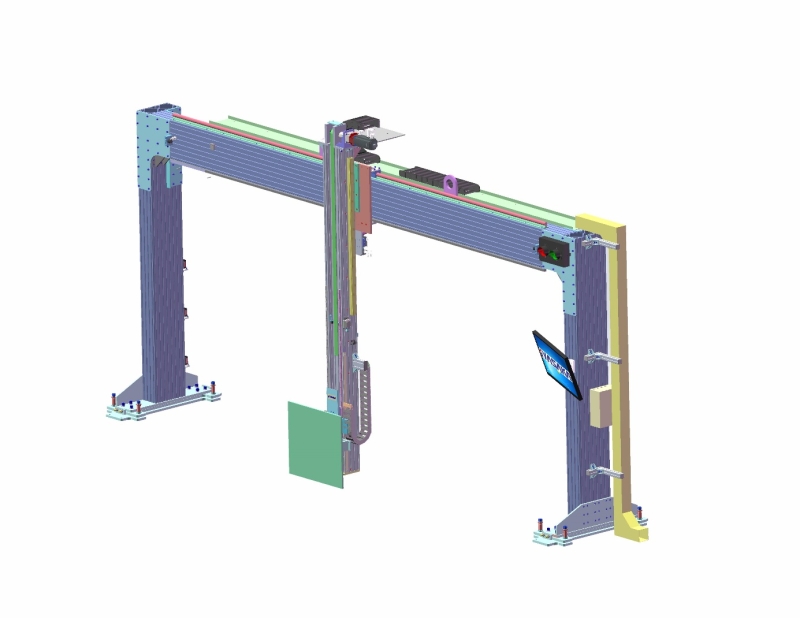
采用铝合金龙门式结构支撑LDW标定目标板,在Z方向上配备西门子伺服电机及直线滑轨,目标板在Z方向上移动采用伺服驱动同步带传动方式,并且精确定位,Z向移动速度大于150mm/s。
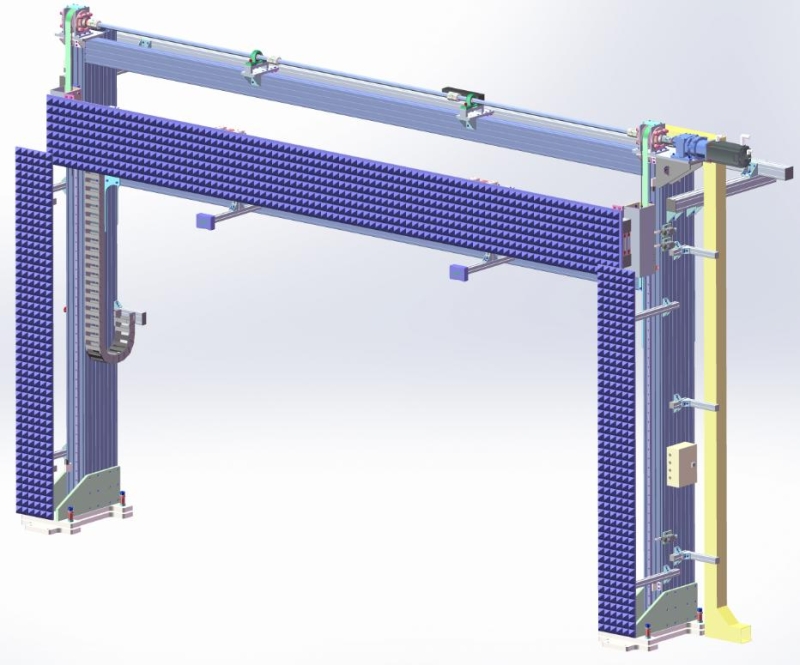
采用铝合金龙门式结构支撑BSD反射三角锥,在X轴方向上配备西门子伺服电机及直线滑轨,自动移动采用同步伺服驱动同步带传动方式, 在Y轴方向上配备西门子伺服电机及圆柱滑轨,自动移动采用伺服驱动齿轮齿条传动方式,在Z方向上配备西门子伺服电机及直线滑轨,自动移动采用同步伺服驱动同步带传动方式,并且精确定位,X向移动速度大于150mm/s、Y向移动速度大于250mm/s、Z向移动速度不大于150mm/s。
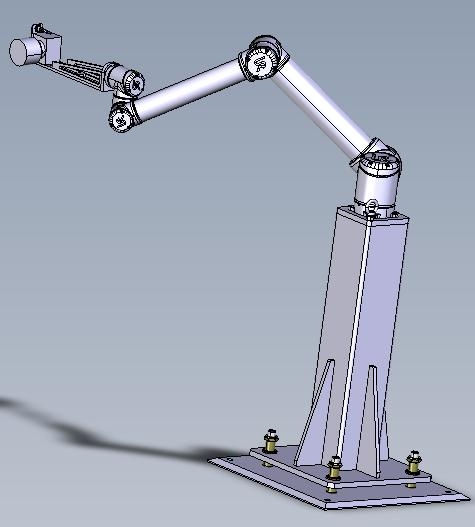
协助机器人装置3D模型示意图 采用六轴协作机器人全自动方式移动相机,无需操作人员提供辅助移动操作。机器人不工作时机器人整体自动移动至远离驾驶位位置,方便驾驶员下车。
 官方网站
官方网站
 微信公众号
微信公众号
